Our main goal was to seek for an approximation of a controller that can be implemented in Homomorphic Encrypted framework to increase the data security. As for the controller we have used the model predictive controller and then we used the data from the control simulation as our base data. But because the MPC cannot be used for homomorphic encryption we had to Implement a neural network to approximate the MPC’s behaviour. So lets start with the system.
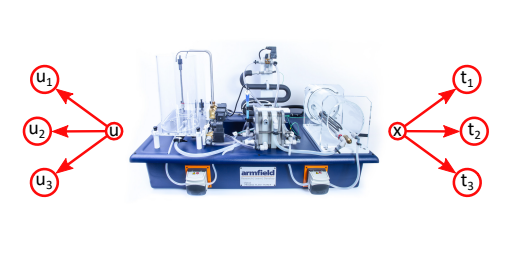
The system which we want to control is a state space model of a pasteurization process which has 3 state variables which are temperatures and 3 control variables two pump speed and a heater. These control variables has physical constraints between zero and hundred percent of power (graph 1). For the approximation of MPC we used a dense neural network model, precisely a supervise learning algorithm the Multi layer perceptron and we have chosen the hyperbolic tangent activation for it. But unfortunately we cannot use the hyperbolic tangent as the activation for the homomorphic framework so we had to approximate its behaviour. To approximate the hyperbolic tangent function we used polynomials and one of these was the fifth degree polynomial which we used as activation function for the model training. We have also trained other models for comparison with the same settings, only the activation function was changed. For comparison we set these models to the task of disturbance rejection to the steady state.
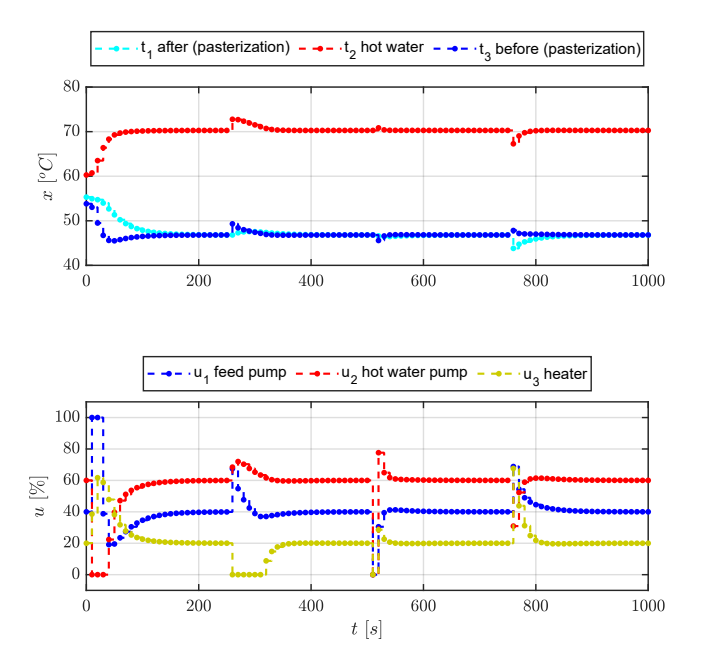
On the graph 2 we can see the disturbance rejection with the MPC in discrete time which was used for benchmark.
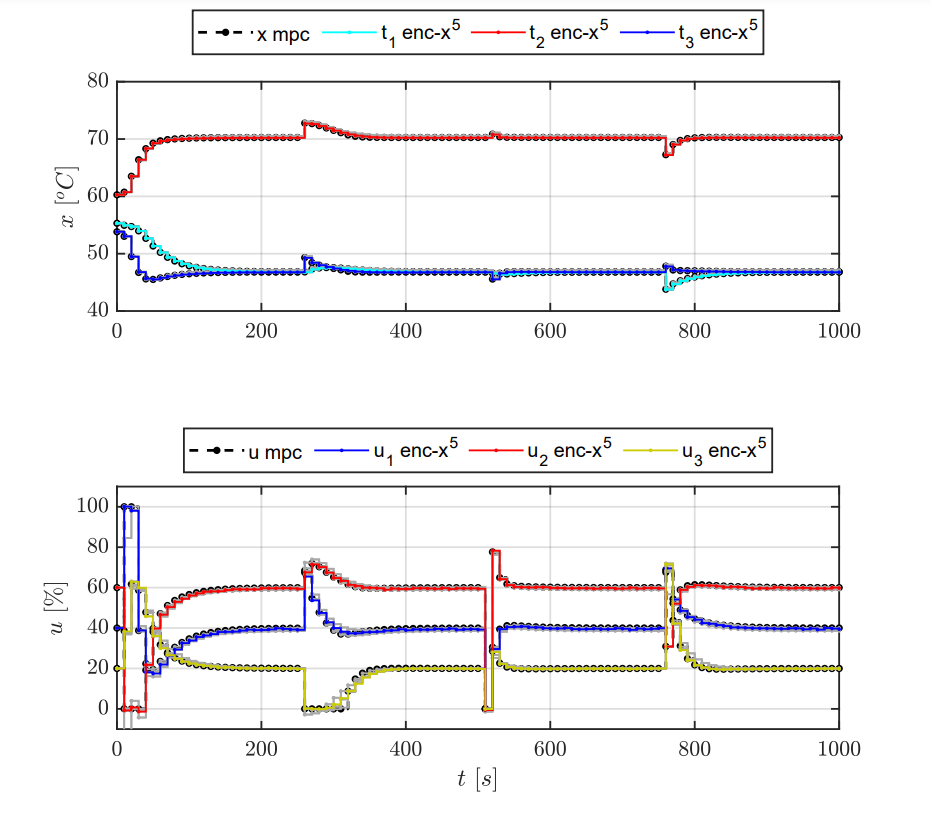
We compared the progress of all the models we created and we found the best candidate from our tries for approximation of MPC that can be implemented in homomorphic encrypted framework wich is the fifth degree polynomial model and it’s control scheme can be seen on graph 3.