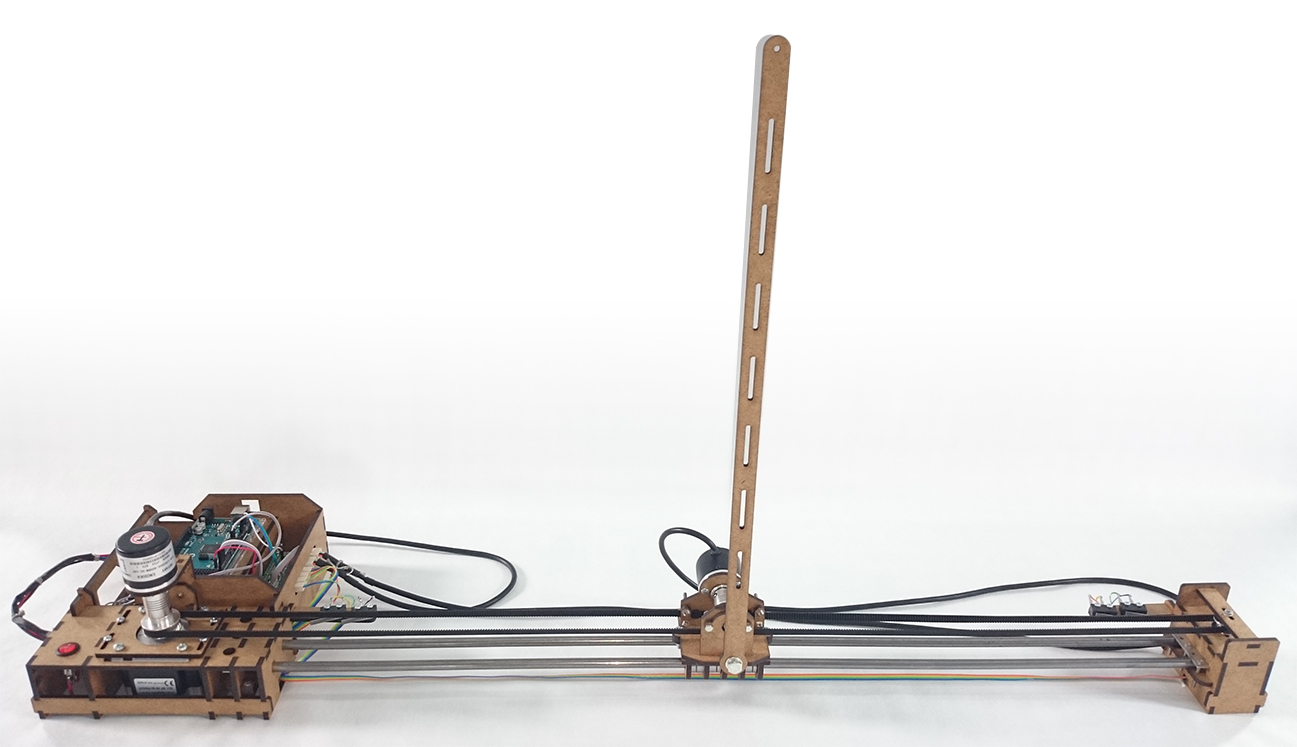
Pre proces inverzného kyvadla, ktorý je znázornený na obrázku nižšie, bolo cieľom v diplomovej práci stanoviť zákon riadenia, ktorý vyšvihne a stabilizuje kyvadlo vo vzpriamenej zvislej polohe tak, aby umožnilo vozíku pohybovať sa v medziach ohraničení. Význam tohto systému vyplýva z jeho teoretickej i praktickej aplikácie.
Teoretická hodnota inverzného kyvadla vychádza z toho, že ide o nelineárny systém, čo znamená, že jeho pohybové rovnice sú nelineárne diferenciálne rovnice. To spôsobuje, že výpočet vhodného zákona riadenia je náročná a zdĺhavá úloha. Okrem toho môže byť model za určitých okolností zjednodušený do lineárneho systému okolo rovnovážneho bodu umiestneného vo zvislej vertikálnej polohe, čo umožňuje, aby sa použili lineárne metódy na stabilizáciu. Táto flexibilita robí tento systém skvelým príkladom pre štúdium lineárnych i nelineárnych prístupov riadenia, pretože sa prostredníctvom nej môžu prezentovať rôzne teórie a metódy.
Mnohé praktické aplikácie inverzného kyvadla robia jeho štúdium ešte zaujímavejším a dôležitejším. V robotike sa balancovacie systémy vyvíjajú pomocou inverzných kyvadiel. Tieto systémy nájdu uplatnenie v dopravných prostriedkoch, ktoré potrebujú stabilizovať objekty, systémy, ktoré podporujú chôdzu pre pacientov, roboty, ktoré sa používajú na domáce a priemyselné účely a na prepravu predmetov pomocou dronov. Napokon jedna z najslávnejších aplikácií inverzného kyvadla, ktoré je komerčne dostupné, je Segway.

Úlohou stabilizácie je riadenie uhla otočenia inverzného kyvadla v jeho prirodzene nestabilnej polohe, hornej vertikálnej polohe. Bolo navrhnutých viacero riadiacich algoritmov, ktoré v návrhu uvažujú lineárny model, ako PID regulátor, ktorý bol navrhnutý metódou umiestnenia pólov, LQ regulátor a MPC regulátor. Navrhnuté regulátory boli implementované na reálny proces laboratórneho inverzného kyvadla. Hlavnou nevýhodou PID regulátora je to, že dokáže uvažovať iba jeden vstup, zrýchlenie vozíka a jeden výstup, uhol otočenia kyvadla, tým pádom sa nezaujíma o zvyšné stavy. Preto je PID regulátor nevhodný na stabilizáciu. LQ a MPC regulátor v navrhnutých algoritmoch uvažuje všetky stavy inverzného kyvadla a preto sú najvhodnejšie na stabilizáciu inverzného kyvadla.
V prípade vyšvihnutia inverzného kyvadla sa uvažovali dva prístupy návrhu riadenia a to, nelineárne prediktívne riadenie na minimalizáciu času a energetický regulátor na minimalizáciu použitej energie.
Cieľom nábehu prediktívnym regulátorom bolo získanie trajektórie pre vyšvihnutie inverzného kyvadla (angl. Swing up), kde bolo potrebné vygenerovať potrebné akčné zásahy, zrýchlenie vozíka na to, aby sa postupným rozkmitaním kyvadlo dostalo zo svojej stabilnej dolnej polohy do nestabilnej hornej polohy. Riadenie sa navrhlo v prostredí MATLAB, kde sa použilo doplnkové programové rozhranie ACADO, ktoré dokáže vyriešiť zložitý problém v tvare nelineárnych diferenciálnych rovníc s goniometrickými funkciami. Získala sa tak optimálna trajektória, ktorá bola implementovaná na reálny proces inverzného kyvadla, kde sa ukázalo, že takýto spôsob riadenia nie je vhodný.
Taktiež bol navrhnutý aj energetický regulátor na vyšvihnutie kyvadla z jeho stabilnej polohy do nestabilnej polohy. Kyvadlo sa jednoducho ovláda takým spôsobom, že jeho energia je poháňaná smerom k hodnote rovnajúcej sa rovnovážnej polohe. Tento prístup dokáže nepriamo vo svojich rovniciach uvažovať aj ohraničenia procesu. Energetický regulátor bol implementovaný na reálny proces v uzavretej slučke, tým pádom akčné zásahy boli vypočítavané na základe aktuálnych stavov. Akonáhle bol uhol kyvadla v blízkosti stabilizačnej polohy, riadenie sa preplo do stabilizácie a získalo sa tak kompletné funkčné riadenie inverzného kyvadla.
Video priebehu vyšvihnutia kyvadla energetickým regulátorom so stabilizačným LQ regulátorom je možné zobraziť tu: Swing up and stabilization of an inverted pendulum