V oblasti riadenia cestnej premávky je v súčasnosti problémom nehodovosť. Medzi príčiny nehôd patria zlyhanie ľudského faktora, nesprávne odhadnutie situácie a nerešpektovanie pravidiel cestnej premávky. Pri nehodách dochádza nie len k ekonomickým a ekologickým škodám, ale častokrát aj k stratám na životoch. Jednou z možností ako sa vysporiadať s týmto problémom je nahradenie ľudského vodiča riadiacim algoritmom.
Už snáď každy počul o komerčných projektoch autonómnych vozidiel spoločností Google, Uber a mnohých iných. Väčšina dostupných vedeckých prác však prináša len počítačové simulácie riadenia premávky. Je to z dôvodu, že vykonanie experimentov v skutočnej premávke by bolo finančne náročné. Jedným z najpoužívanejších alternatívnych prístupov je riadenie robotických modelov vozidiel. V mojej diplomovej práci sa zaoberáme riadením robotických vozidiel využitím prediktívneho riadenia, MPC.
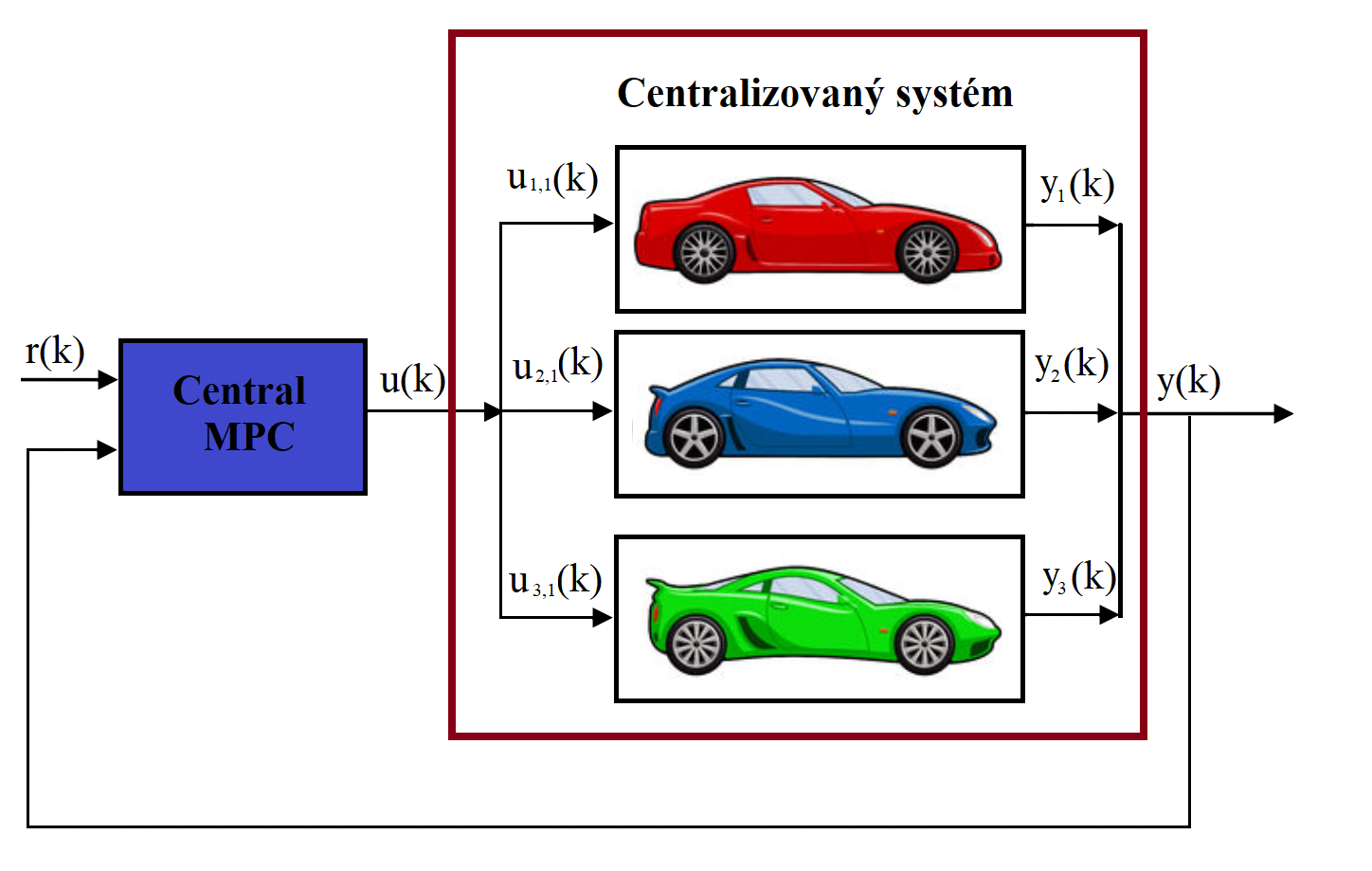
V porovnaní s ostatnými prístupmi, MPC je ako jediný schopný zahrnúť do výpočtov ohraničenia "reálneho sveta". Umožnuje tým vozidlám nastaviť maximálnu/minimálnu povolenú rýchlosť, bezpečnostnú vzdialenosť. MPC rieši riadenie ako optimalizačný problém. Optimalizácia je proces zlepšovania súčasného stavu, ktorého výsledkom je optimálny zásah do systému, ten najlepší možný vzhľadom na dodržanie všetkých obmedzení. Pričom skúmame dva scenáre, v prípade centralizovaného riadenia ovláda jeden regulátor všetky vozidlá, pozná celý riadený systém.
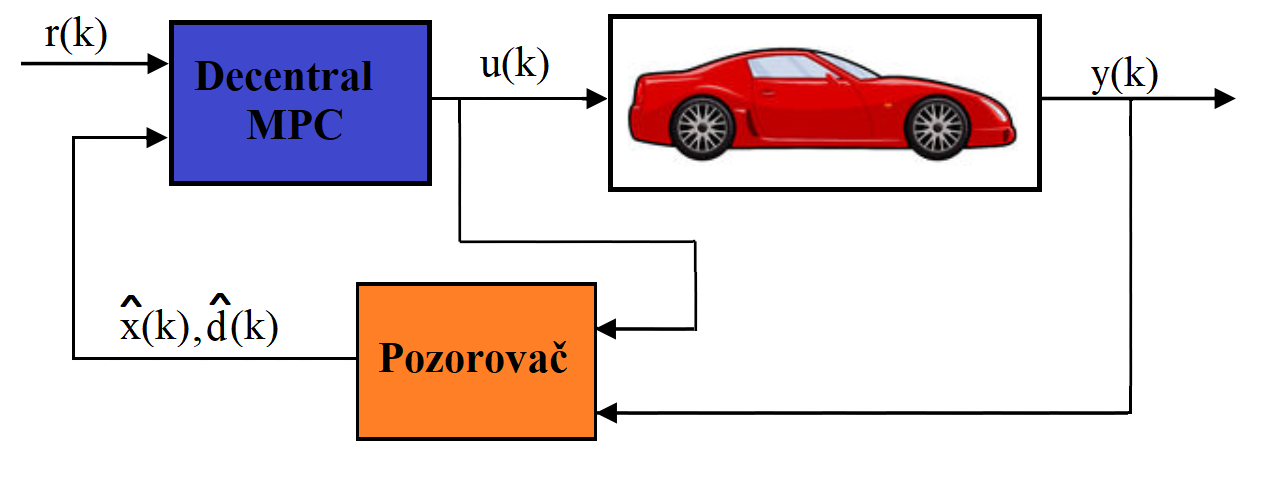
V prípade decentralizovaného riadenia má každé vozidlo vlastný regulátor, ktorý ale disponuje menším množstvom informácií o systéme. V mojej práci sme však vhodným matematickým modelovaním toho, čo regulátor nepozná, jeho nevýhodu eliminovali.
Samozrejme toto je len jeden z možných prístupov. Ako by si problém riadenia cestnej premávky robotických vozidiel riešil ty? Pre každého, koho optimalizácia a riadenie procesov zaujíma, sprístupňujeme použité MATLAB-ové scripty na github-e.