Vo svojej bakalárskej práci som sa zaoberala identifikáciou systému výmenníka tepla a následne som preň navrhla a implementovala robustné prediktívne riadenie. Identifikácia bola opísaná v predošlom blogu, pričom až v letnom semestri som sa zaoberala riadením výmenníka na základe nájdeného prenosu. Ako bolo spomínané, výmenník tepla je nesymetrický systém, pretože rýchlejšie sa zohreje ako vychladne, a taktiež je to systém s nelineárnym správaním, čo sa prejavuje tým, že pri rovnako veľkej skokovej zmene na vstupe sa vykoná rôzna odozva na výstupe. Tieto fakty viedli k tomu, že výsledný prenos systému obsahoval intervalové neurčitosti, čiže nielen konštanty zosilnenia, časovej konštanty a dopravného oneskorenia, ale ich intervaly.

Takáto forma prenosu nám už asi napovedá, že „obyčajný“ PID regulátor pre takýto systém nebude práve najlepšie riešenie. Preto vznikli rôzne formy pokročilého riadenia, pričom ja som sa zaoberala robustným prediktívnym riadením.
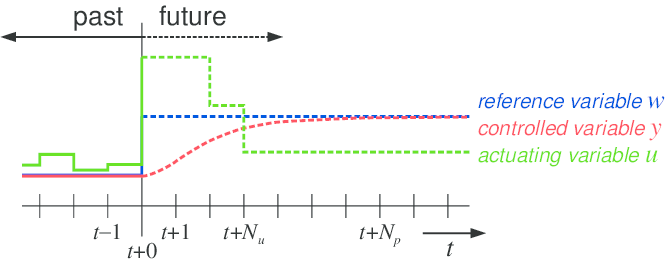
Na to, aby sme ľahšie pochopili jeho podstatu, treba najskôr poznať podstatu prediktívneho riadenia. Pod týmto pojmom rozumieme metódy regulácie, ktoré sú založené na optimalizácii akčných zásahov prostredníctvom predikcie budúceho správania sa systému. Jednoducho povedané, regulátor vypočíta na základe momentálneho stavu, v ktorom sa systém nachádza, aká je optimálna trajektória akčných zásahov. Výhoda je, že regulátor nevykoná túto optimalizáciu iba raz, ale v každom kroku na základe novej informácie o stave systému, pretože vždy sa vykoná iba prvý akčný zásah a potom v ďalšej perióde vzorkovania sa optimalizačný výpočet vykoná znova.
Výhodou prediktívneho riadenia je to, že môžeme zahrnúť aj obmedzenia na vstupy, výstupy, ktoré sú dané technickými parametrami alebo aj našimi požiadavkami na reguláciu.
Robustné prediktívne riadenie je schopné zohľadniť aj neurčitosti systému. Pracuje sa teda s vrcholovými maticami stavového opisu, ktoré predstavujú hraničné správanie systému. Ak teda vie regulátor „zvládnuť“ toto hraničné správanie sa systému, vie riadiť aj každé správanie medzi tým.
Teraz sa naskytuje otázka: Čo som vlastne reálne robila? Po tom, ako som previedla identifikovaný prenos systému výmenníka tepla do stavového opisu v diskrétnej časovej oblasti, musela som hľadať vhodné váhové matice, ktorými som nastavovala váhu na P, I zložku regulátora a na vstupy systému, aby riadenie bolo dostatočne kvalitné a zároveň, aby sme dosahovali minimalizáciu nákladov na spotrebu horúceho média. Veď ako by povedali kolegovia z Ústavu chemického a environmentálneho inžinierstva, všetko je o peniazoch.
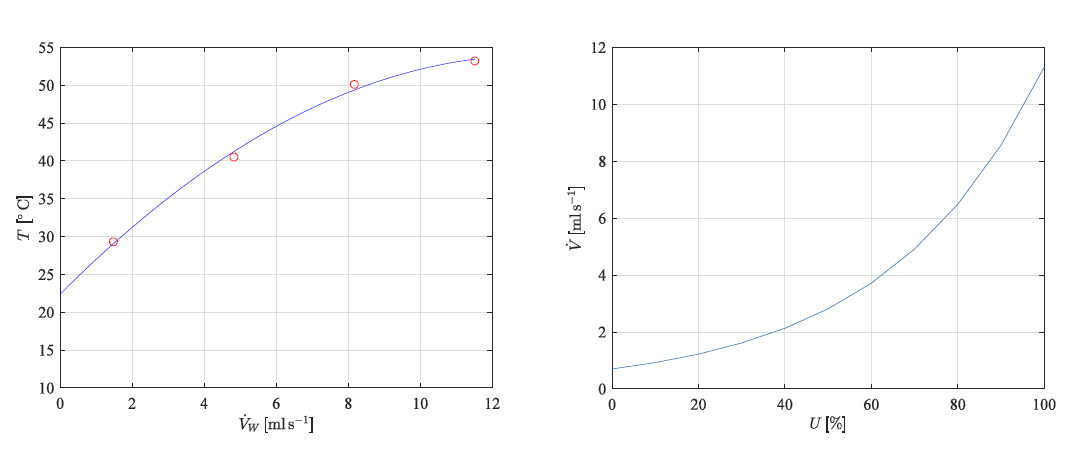
Aby to nebolo také jednoduché, skúšala som porovnávať riadenie pomocou lineárnej a ekvipercentnej charakteristiky čerpadla. Predpoklad bol nasledujúci – keďže systém výmenníka tepla je nelineárny, čo možno vidieť aj nižšie na prevodovej charakteristike (závislosť teploty od prietoku ohrevného média), ekvipercentná charakteristika by ho mala svojím exponenciálnym tvarom pekne kompenzovať a tak skvalitniť riadenie.
Nižšie môžeme vidieť regulačný pochod pri riadení teploty zo 40 na 35°C a aj akčné zásahy, pričom zelená a oranžová farba znázorňujú riadenie pomocou ekvipercentnej charakteristiky.
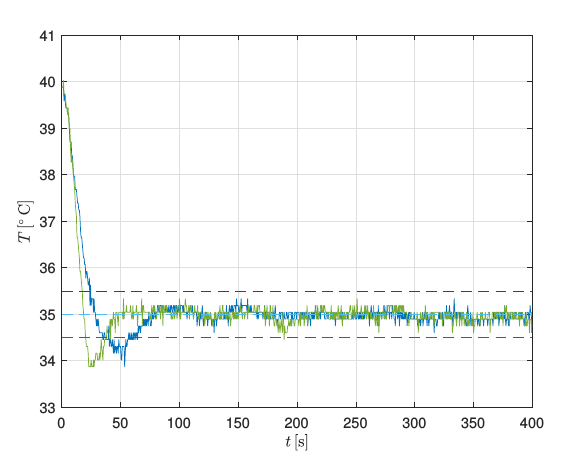
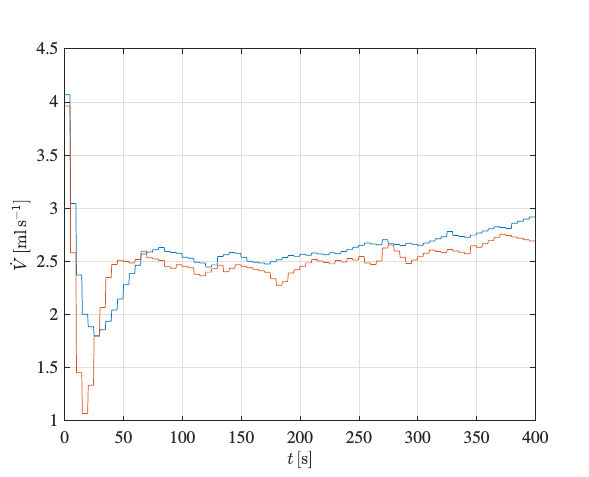
Ako môžeme vidieť, v prípade lineárnej charakteristiky je vyšší čas regulácie a aj spotreba ohrevného média. Samozrejme, v prípade laboratórneho výmenníka tepla rozdiely medzi týmito dvoma typmi čerpania nie sú veľmi veľké, no v priemysle, kde sa riadi teplota vo výmenníkoch v oveľa väčšom množstve a rozsahu, môže ísť o významné šetrenie nákladov. Koniec koncov, veď viete, o čom to všetko je :-).