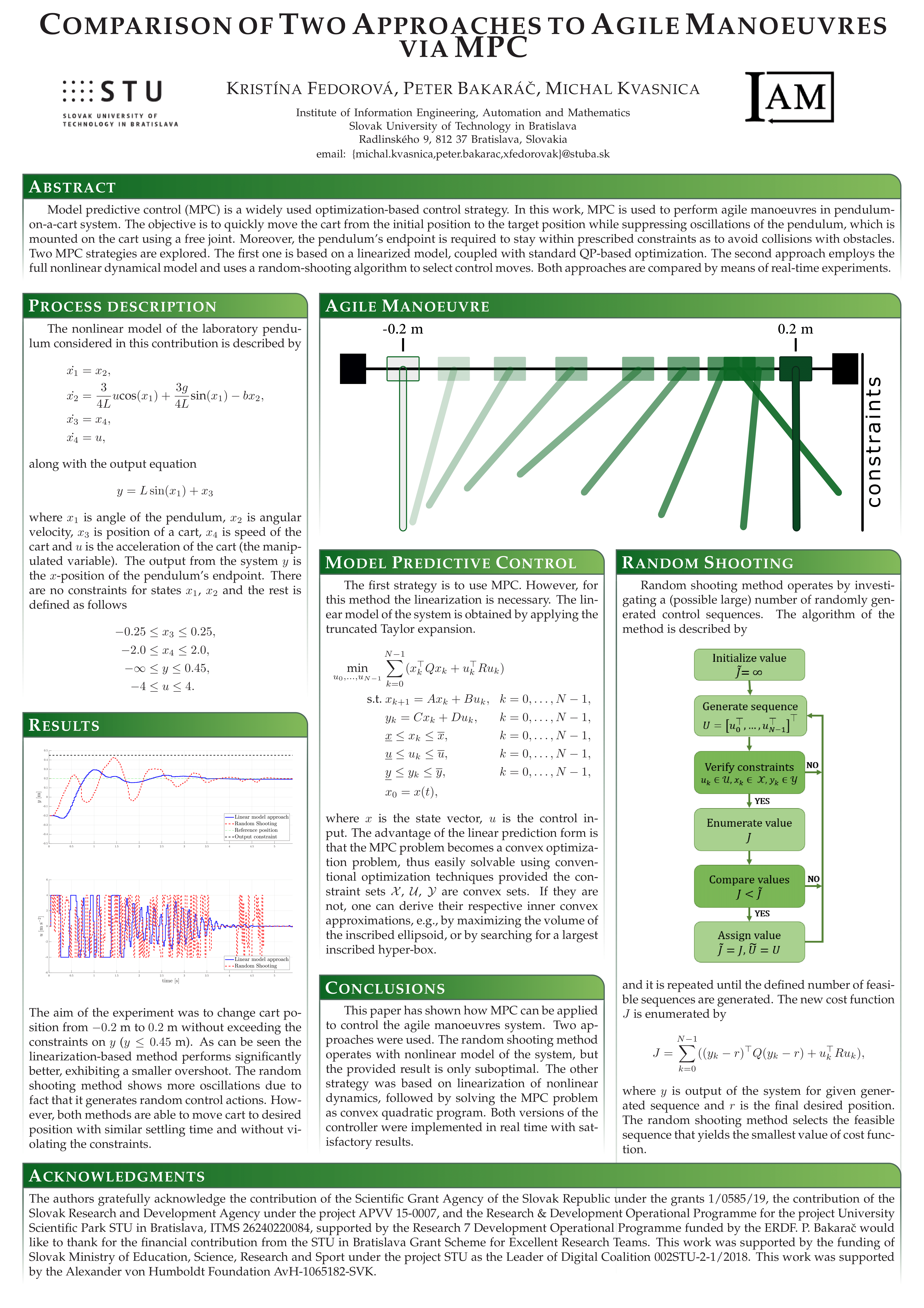
V mojom semestrálnom projekte som sa zaoberala použitím MPC na agilné manévre. Úlohou je rýchly presun vozíka s kyvadlom z počiatočnej polohy do referenčnej čo najrýchlejšie a bez porušenia ohraničení (teda bez kolízie s prekážkou). Jednoduché. Keďže máme problém s ohraničeniami, na riadenie požijeme MPC. A výsledok? Žiadne uskutočniteľné riešenie. Prečo? Ak zoberieme do úvahy náš systém (kyvadlo na vozíku), ktorý je nelineárny a zároveň periódu vzorkovania 20 ms, zistíme, že výpočet optimálnej trajektórie trvá oveľa dlhšie ako je perióda vzorkovania. Čiže potrebujeme nájsť nejakú modifikáciu MPC, ktorou znížime čas výpočtu akčného zásahu.
Práca ako taká, teda použité metódy na riešenie tohoto problému, ale aj výsledky, ktoré sa nám podarilo dosiahnuť, si môžete pozrieť na posteri, na ktorom sú všetky tieto body zhrnuté 🙂