Na nasledujúcich riadkoch by som vám rád predstavil semestrálny projekt, ktorý sa zaoberal návrhom nadradeného riadenia prostredníctvom neurónových sietí.
Na začiatok si skúste predstaviť proces – našim študentom verne známe zásobníky kvapaliny, chemický reaktor alebo čokoľvek iné. Tento proces je najčastejšie regulovaný PID regulátorom, alebo ako to v priemysle často býva, celou sieťou takýchto regulátorov. Ak chceme takýto proces riadiť, máme dve možnosti – buď zadáme žiadanú veličinu pre každý regulátor zvlášť, alebo využijeme systém nadradeného riadenia, napríklad vo forme MPC regulátora. MPC, z angl. model predictive control je optimalizačná stratégia, ktorá pri správnom nastavení parametrov poskytne vnútorným regulátorom špeciálne upravenú referenciu, pre dosiahnutie optimálneho riadenia. Problémom pri použití takýchto regulátorov je ich závislosť na modeli procesu – keď totiž dôjde aj k malej zmene modelu (napr. zmenou zosilnenia jedného z vnútorných PID regulátorov), riadenie začne byť nepresné a MPC sa musí nastaviť pre nový model systému. Mojím cieľom bolo navrhnutie neurónovej siete, ktorá by okrem bežných vstupov MPC regulátora dostávala informáciu aj o aktuálnom nastavení parametrov vnútorných regulátorov a dokázala by tak proces uriadiť aj pri zmene modelu. Takto skonštruovaná a správne natrénovaná neurónová sieť by mala byť schopná aproximovať a nahradiť MPC regulátor.

V prvom kroku projektu bola vytvorená jednoduchá riadiaca slučka, pozostávajúca z procesu, ktorým bol dvojitý integrátor, PD regulátora a zápornej spätnej väzby. Ako premenná v tomto systéme bolo zvolené zosilnenie proporcionálnej časti PD regulátora. Po naladení PD regulátora a overení ustáleného stavu nasledovalo zaradenie MPC regulátora do uzavretej slučky. Tento systém bol použitý na generovanie trénovacích dát pre neurónovú sieť. Výsledkom bola matica trénovacích dát o rozmere necelých 40 000 riadkov. Takto pripravené dáta boli použité na natrénovanie neurónovej siete, ktorá pozostávala zo vstupnej vrstvy s piatimi vstupmi – stavmi procesu, užívateľom zvolenou referenčnou hodnotou žiadanej veličiny a zosilnením PD regulátora, štyroch vnútorných vrstiev a jedného výstupu – upravenou referenciou pre vnútorný regulátor.
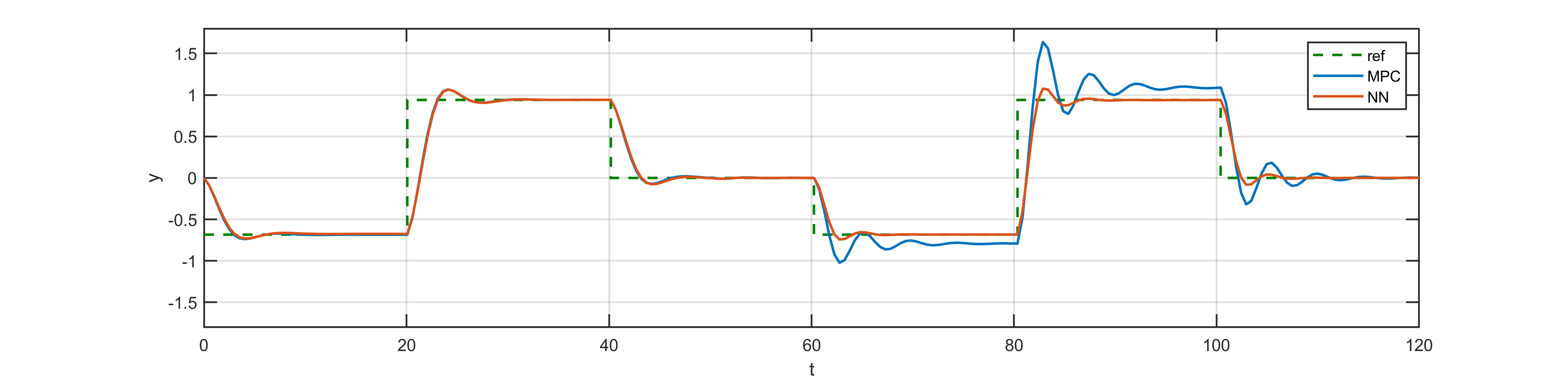
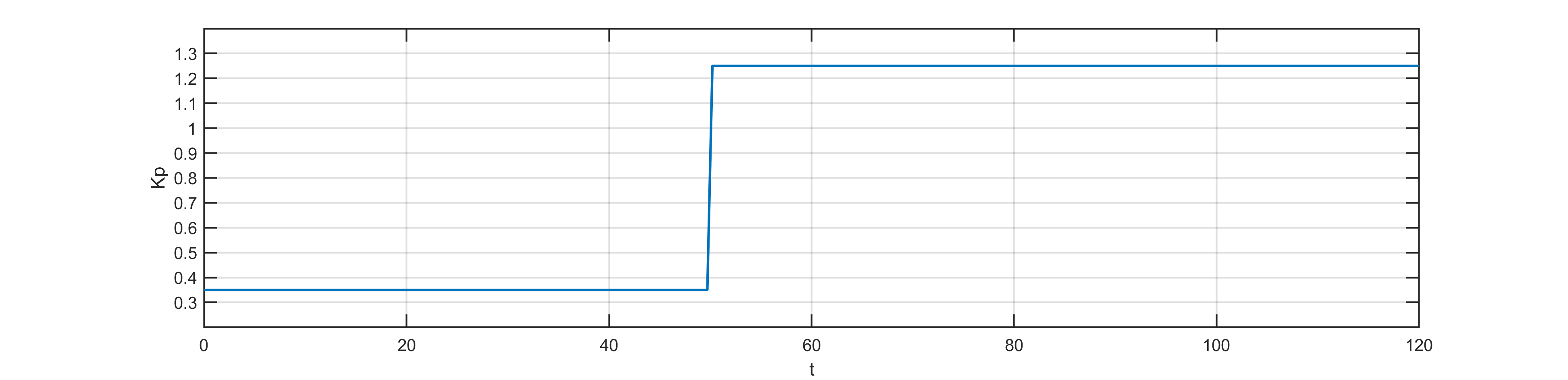
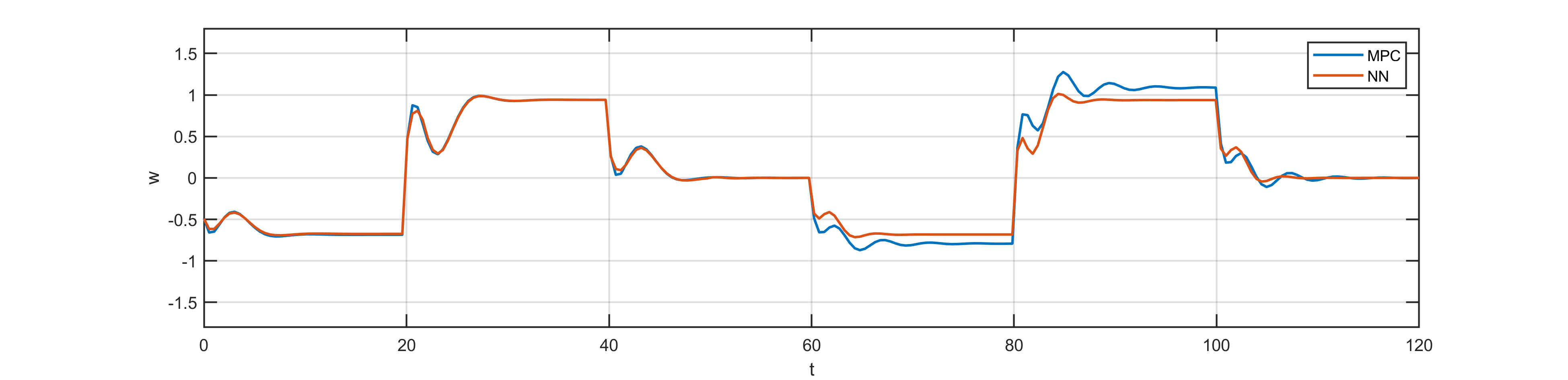
Po natrénovaní neurónovej siete ostávalo vyhodnotiť kvalitu riadenia medzi systémom s MPC regulátorom a systémom, kde bol tento regulátor nahradený neurónovou sieťou. Vo vstupnej veličine boli spravené tri náhodné skokové zmeny, nasledované tromi rovnakými zmenami pri odlišnej hodnote zosilnenia PD regulátora. Ako je vidno na grafe nižšie, pri pôvodnom zosilnení PD regulátora riadi MPC proces bez problémov, avšak akonáhle dôjde k zmene zosilnenia a tým pádom aj k zmene modelu, výstup zo systému riadeného MPC regulátorom je nepresný, kmitavý a s trvalou regulačnou odchýlkou. Riadenie pomocou neurónovej siete je však aj po zmene zosilnenia naďalej presné, bez regulačnej odchýlky.